This page is a compendium of past meetings. Media (videos of meetings, slides, etc) will be available for 3 months after the meeting.
Jan 22, 2026 – Highlights from ROSCon 2025 & Scan-N-Plan Overview
 |
 |
The recording of the presentation will be available for 90 days.
Oct 23, 2025 – Maker Fest!
Calling all makers, hobbyists, etc.!
The Lone Star Chapter of the IEEE Robotics and Automation Society is holding a “maker fest,” and we’re looking for people to show off their home and hobby projects. This meeting will be a good chance to show off the project you’ve been working on for your house, back yard, etc. The project does not need to be complete – in fact, this can be a good opportunity to get advice on how to get it finished! If you have a project that is too big to bring in, we can provide screens to show off images and videos of your work.
The meeting will be at Trinity University, in CSI-282 (Center for Sciences and Innovation, ground floor) and students are especially invited to attend.




Sept 25, 2025 – ARTEMIS: A High-Performance Humanoid for Competitive Soccer

Mingzhang (Norman) Zhu, Ph.D. Student in the RoMeLa Lab at UCLA presented:
ARTEMIS, a 20-DoF humanoid robot built for high-performance autonomous soccer. Featuring custom quasi-direct drive actuators, lightweight legs, and flexure-based foot sensors, ARTEMIS achieves low inertia, strong kicking, and agile locomotion. A hierarchical control stack integrates predictive models with full-order tracking, enabling stable walking, precise ball handling, and responsive planning. With integrated vision, localization, and behavior-tree high-level control, ARTEMIS perceives the game state and executes soccer behaviors autonomously. At RoboCup 2024, ARTEMIS won the Adult Size League with 45 goals in six matches, establishing a benchmark platform for advancing dynamic humanoid robotics.
The recording remained available for 90 days after the presentation.
Aug 28, 2025 – Space Station Robotics
This presentation surveyed an interesting collection of robot arms that have two common features: they all operate outside any gravitational field, and they are attached to orbiting spacecraft. Their extended length ranges from a few feet to about sixty feet, and some can manipulate objects as massive as several dozen tons. The arms in this collection are the products of Earth’s brightest engineers and scientists.
Tom O'Brien joined IEEE as a student in 1961 when it was the Institute of Radio Engineers. He earned a BSEE from Texas A&M, and (much later) a Master of Science (Telecommunications) from Southern Methodist University. After graduation from Texas A&M, he joined LTV Aerospace to work on flight control systems. From there he moved into computer systems and applications, such as online business systems, airline reservations, spacecraft computer systems, and space robotics. He is a licensed professional engineer in Texas and a member of both "Sons of the American Revolution" and the "Jamestowne Society". Tom is an active IEEE member, amateur radio operator, and continuing education learner/teacher.
June 26, 2025 – Actuator Design for In-Space Operations
Abstract: Full state feedback (FSF) controllers for series elastic actuators bridge the gap between impedance and admittance controllers. For robot manipulators-which must stably accomplish both stiff and soft behaviors-FSF controllers are ideal candidate joint controllers. Although previous work on FSF gain tuning has derived necessary and sufficient conditions on controller passivity with time-delay and derivative filtering, they fail to achieve their target impedance behavior due to the large nonlinear friction found in the high gear-reduction actuators of robot manipulators. In this talk, I will discuss the history, advantages, and disadvantages of adaptive friction models and friction observers. I will then present a novel, back-drivable friction compensator that combines an adaptive Karnopp friction model in parallel with dual disturbance observers for model training and disturbance attenuation. Low-speed time-domain demonstrations show an improvement in trajectory tracking for the combined compensator over separate modeled or unmodeled approaches.
Read more about the lab at: https://stories.tamu.edu/news/2024/01/10/engineering-leads-collaboration-for-in-space-operations-technologies/
Apr 24, 2025 – SubArc: An Inexpensive, High Resolution, Open Source, Absolute Magnetic Rotary Encoder
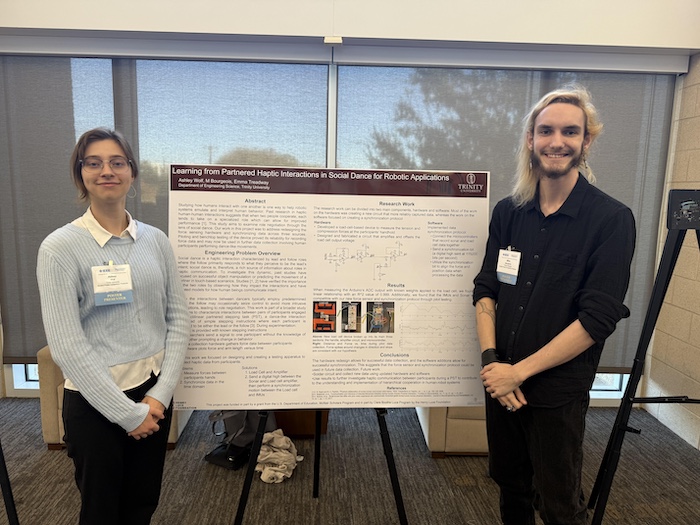
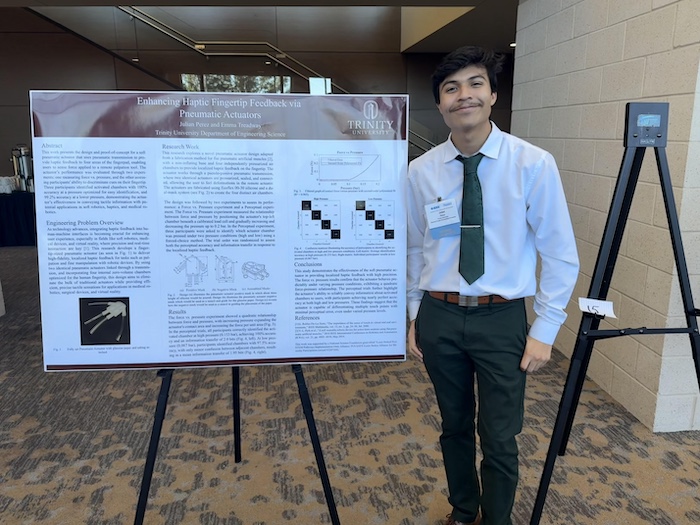
Mar 26, 2025 – Haptics Research at Trinity University
Poster Session & Lunch 11:30-1:00pm
- M Bourgeois:“Learning from Partnered Haptic Interactions in Social Dance for Robotic Applications”
- Julian Perez: “Enhancing Haptic Fingertip Feedback via Pneumatic Actuators”
- Dawson Durr: “Incidental and Referred Haptic Feedback in the Digital Extenders.”
- Tours of the Treadway Lab
| Presenter | Topic |
|---|---|
 |
Dawson Durr: “Incidental and Referred Haptic Feedback in the Digital Extenders.” |
 |
M Bourgeois:“Learning from Partnered Haptic Interactions in Social Dance for Robotic Applications” |
 |
Julian Perez: “Enhancing Haptic Fingertip Feedback via Pneumatic Actuators” |
Feb 27, 2025 – Joint Meeting of the LSS and the UTSA Robotics and Automation Chapters
The UTSA Robotics and Automation Student Chapter will host a make-and-take event where attendees will get hands-on experience assembling a THT (through hole) circuit board and programming a microcontroller to act as a human interface device with a computer. Participants are encouraged to bring their own computer but there will be a few on hand if people cannot bring their own. In addition to building and taking home your own functional project, participants will also gain insight into how UTSA RAS organizes and runs our “Make-and-Take” events —perfect for those interested in learning event planning and technical workshops.
Park in the lot between Ximenes Ave. and Ransom Rd. and walk around to the AET Building entrance. Download a map using the MEDIA button below. This will be an evening meeting and there will be plenty of parking spaces.


Jan 23, 2025 – The Stryker Mako Orthopedic Robot
The meeting was at a facility of the San Antonio Orthopedic and Spine Treatment Center (TSAOG). Representatives of the Orthopedic group and/or Stryker Inc. will discuss the robot and provide a demonstration of its operation and capabilities.




Oct 24, 2024 – Maker Fest!
Calling all makers, hobbyists, etc.!
The Lone Star Chapter of the IEEE Robotics and Automation Society is holding a “maker fest,” and we’re looking for people to show off their home and hobby projects. This meeting will be a good chance to show off the project you’ve been working on for your house, back yard, etc. The project does not need to be complete – in fact, this can be a good opportunity to get advice on how to get it finished! If you have a project that is too big to bring in, we can provide screens to show off images and videos of your work.
The meeting will be at Trinity University, in CSI-282 (Center for Sciences and Innovation, ground floor) and students are especially invited to attend.





Sept 26, 2024 – RAS Chapter Tour of Renu Robotics
Controlling the growth of grass and weeds is a necessary part on of large solar farm operations. Renu Robotics has developed autonomous mowing machines specifically designed to operate among arrays of solar panels. These battery powered, robotic systems are equipped with GPS and sensors for navigation and obstacle detection. Additional information is available at renubotics.com
The program will include a presentation on the Renubot design and operation followed by a tour through the manufacturing facility. Only the presentation will be provided on Zoom.
Aug 15, 2024 – RAS Support of SAMSAT Activities
Dr. Ernest Franke
Topic:
LSS Life Members Activities
This program will be a review and slide show of projects the Life Members have worked on at the San Antonio Museum of Science and Technology. Since 2017 Lone Star Section Life Members have volunteered at SAMSAT and during the past 8 years dozens of IEEE members have contributed thousands of man hours working on scores of different projects. Photos taken during work sessions will show the wide variety of tasks that have been done from 2017 up to the past weekend..
Biography:
Ernest Franke received BS and MS degrees in Electrical Engineering at Texas A&I University and a PhD in Engineering at Case-Western Reserve University. He was a professor and Dean of Engineering at Texas A&I University (now Texas A&M – Kingsville), Vice President for Research at Alpha Electronics Co. and an Institute Engineer at Southwest Research Institute. Dr. Franke was Chair of the Corpus Christi Section and of the Central Texas Section of the IEEE. He is a past chair of the Lone Star Life Members Affinity Group and currently serves as Secretary of the Lone Star Section and Chair of the Robotics and Automation Chapter. He is retired and spends his time maintaining a sailboat and volunteering at SAMSAT.
June 27, 2024 – Drone Applications for Transmission Line Monitoring

Southwest Research Institute (SwRI) is developing under contract to the Electric Power Research Institute (EPRI) an installation system for high voltage power transmission monitors using uncrewed aerial systems (UAS). The system mounted on a UAS can install an EPRI RF monitor onto power transmission lines without requiring linemen or bucket trucks. The system increases safety of the installation and significantly reduces the amount of time required to install the monitors. The challenges of design, testing, safety, and UAS regulations as they apply to this application will be discussed.
Biography:
Mr. Wagner is a Research Engineer in the Robotic Platforms Section at Southwest Research Institute (SwRI). His background includes robotics, mechatronics, and computer-aided design and manufacture. He is an FAA Part 107 Small Unmanned Aircraft System (sUAS) pilot, and he has experience with Robot Operating System (ROS), SolidWorks, Python, MATLAB, Linux, and 3D printing.
At SwRI Mr. Wagner has worked on hardware integration activities including complete automated vehicle (AV) vehicle platform design, sensor mounting, enclosure design, uncrewed aerial systems (UAS) payload design, and ground vehicle improvements. Mr. Wagner has also worked on software development in the
ROS framework for both ground and aerial robots. He led an internal research project to modify existing exploration algorithms to operate on a Size, Weight, and Power (SWaP)-constrained UAS platform.
At Virginia Tech, Mr. Wagner worked as a Graduate Research Assistant in the Uncrewed Aircraft Systems Lab. His thesis, titled “Online Unmanned Ground Vehicle Mission Planning using Active Aerial Vehicle Exploration,” focused on an exploration technique in which a UAS was mapping an environment with a stereo camera for an uncrewed ground vehicle (UGV). He developed an algorithm utilizing rapidly exploring random trees (RRTs) to find exploration frontiers for the UAS to visit.
A recording will be available for 90 days after the meeting.
May 23, 2024 – Legal Issues for Start-Up Companies and Entrepreneurs
Have you ever thought of starting your own robotics company? Or perhaps you would like to know if a company is following good practices? If so, you should join us for an introduction to legal issues for start-up companies.
Drawing upon his thirty years in university research management, where he built and managed collaborations with entrepreneurs, start-ups, small to large companies, and global partners, James Casey shared those legal issues that start-up companies and entrepreneurs need to be aware of for success. This overview also included mention of connected non-legal leading practices so that attendees will get the larger context for success. Ample time was allowed at the end for Q&A and discussion.
A recording will be available for 90 days after the meeting.
Apr 25, 2024 – Air Drone Systems
Join us for a presentation by Aire Drone Systems as we unveil our groundbreaking solution for tackling maintenance challenges in inaccessible environments. Discover our proof-of-concept system, designed to automate tasks like replacing satellite dishes or light bulbs atop cell towers. We’ll delve into our roadmap for future development, addressing potential technical and financial hurdles, and explore how our adaptable design can be tailored to solve a myriad of real-world problems. Don’t miss this opportunity to glimpse the future of aerial maintenance technology
Alfonso Kamel
Alfonso studied Electrical Engineering at Trinity University where he and Gabe competed as finalists at the Trinity University Stumberg Competition. He has been interested in small electronics since he first began modifying gaming consoles in middle school. He engaged in a summer research experience with Dr. Kevin Nickels where he worked on a robotics localization system that used images of ceiling tiles to approximate position. He also held an internship in electronics engineering at Lancer Worldwide where he developed automated testing systems for complex printed circuit boards. He currently lives in San Antonio, Texas where he works as an Electrical Design engineer at ENTRUST Solutions Group.
Gabe Ogden



Recording: video recording (avilable for 90 days)
Mar 28, 2024 – UTSA RAS Chapter Open House
Joint Meeting of the LSS and the UTSA Robotics and Automation Chapters
The UTSA Robotics and Automation Student Chapter will host a lab open house to showcase their educational programs, current projects and project teams. This will be an evening meeting, at a time when many of the teams will be working on their projects and there will be plenty of parking spaces. Projects to be shown include:
- The RAS-UTSA Rover Competition team is creating a robot meant to complete complex tasks for a mock Mars mission. They are working on a modular platform that can quickly swap tools for different missions, and a robust intelligent navigation system that will find the safest and quickest path in a dynamic environment.
- The RAS-UTSA Roadrunner RoboCup team exists to win RoboCup while pioneering cutting-edge techniques in physics simulation, numerical optimization, MPC, ML, and RL. We envision a future where our suite of high-quality tools streamlines the development of complex robotic systems, democratizing advanced capabilities.
- Other projects from various students will also be presented.
Feb 22, 2024 – RAS Chapter Engineers Week Social
This was an opportunity to celebrate Engineers Week, relax and visit with others in the robotics and automation community in San Antonio. After all the hard work that IEEE volunteers put into recent meetings this will be a welcome change of pace. The Elsewhere Garden offers games, drinks, food and entertainment in an informal atmosphere. Anyone interested in meeting and networking with others in the San Antonio Robotics community is welcome. Unfortunately this event was not included in the RAS chapter budget so everyone will be responsible for their own tab.
Jan 24, 2024 – What is the Next Industrial Revolution?
Speaker: MengChu Zhou (Distinguished Lecturer, Fellow of IEEE)
Dr. Zhou joined the Department of Electrical and Computer Engineering, New Jersey Institute of Technology in 1990, and is now a Distinguished Professor. His interests are in intelligent automation, complex systems and networks, Petri nets, Internet of Things, edge/cloud computing, and big data analytics. He has over 900 publications including 12 books, over 600 journal papers including over 500 IEEE Transactions papers, 30 patents and 29 book-chapters. He is a recipient of Excellence in Research Prize and Medal from NJIT, Humboldt Research Award for US Senior Scientists from Alexander von Humboldt Foundation, and Franklin V. Taylor Memorial Award and the Norbert Wiener Award from IEEE Systems, Man, and Cybernetics Society, Distinguished Service Award from IEEE Robotics and Automation Society, and Edison Patent Award from the Research & Development Council of New Jersey. He is Fellow of International Federation of Automatic Control, American Association for the Advancement of Science, Chinese Association of Automation and National Academy of Inventors.
Talk: What is the Next Industrial Revolution?
Human beings have experienced two major industrial revolutions. The first one took place in the 19th century, which replaced muscle power from humans and animals with mechanical power. The second one started in the middle 20th century, which provided people and societies with Internet. It was built with the technologies from computing, communication, networking and information storage. Both offered unprecedented productivity increases. What will be the next one? This talk intends to answer this question by presenting some recent development of Internet of Things (IoT) and smart systems. IoT was selected by IEEE as a major initiative to develop and advance over the next few years. Several recent studies have predicted the huge growth of IoT and tremendous benefits to the world economy. It was expected that 26 billion IoT units would be installed by year 2020, generating $300 billion in revenue. The IoT will generate an additional $1.9 trillion in economic value. We plan to present a system engineering approach to Internet-of-Things-based smart systems and their applications to smart manufacturing, smart cities, smart gird, smart logistics, and smart healthcare services.
Dec 7, 2023 – Alt-Bionics – Developing cost-effective hands for prosthetics and robots
Alt-Bionics – Current Technology, Challenges and Vision for the Future
In this presentation I would speak about our innovative approach to creating affordable and advanced bionic
hands for amputees. I’ll take you through our journey from the initial idea to our current successes, including our
recent collaboration with Apptronik and our venture into the realm of humanoid robots. The goal for the
presentation is for attendees to gain insights into the technology that powers our products, the challenges we’ve
faced in the bionics industry, and our vision for the future of prosthetics and humanoid robots.
Biography:
Ryan Saavedra, 28, founded Alt-Bionics to create affordable bionic prosthetics for amputees. The idea originated from a school project at The University of Texas at San Antonio, where he and his classmates built a robotic prosthetic hand for under $700. After meeting Ryan Davis,
an Army Ranger who lost his arm, Saavedra was inspired to bring this life-changing technology to the world. Since founding Alt-Bionics, he has dedicated the past three years to developing accessible and advanced bionic prosthetic devices.”
Nov 17, 2023 – Undergraduate Drone Research Programs at UIW
This will be a hybrid meeting for both in-person and Zoom participants. The program will be an overview of drone research at the University of the Incarnate Word and a tour of their facilities. Pizza will be provided for a charge of $5 a person (free for students).
Sept 28, 2023 – Maker Fest – Calling all Makers & Hobbiests
Calling all makers, hobbyists, etc.!
The Lone Star Chapter of the IEEE Robotics and Automation Society is holding a “maker fest,” and we’re looking for people to show off their home and hobby projects. This meeting will be a good chance to show off the project you’ve been working on for your house, back yard, etc. The project does not need to be complete – in fact, this can be a good opportunity to get advice on how to get it finished! If you have a project that is too big to bring in, we can provide screens to show off images and videos of your work.
The meeting will be at Trinity University, in CSI-282 (Center for Sciences and Innovation, ground floor) on September 28th at 6:30pm and students are especially invited to attend. If you’re interested in bringing a project to share, please contact i.meinzen@ieee.org so we can make sure we have a space for you!
Aug 24, 2023 – Humanoid Robots
Leo Chen, director of US operations for Engineered Arts.
July 27, 2023 – Empowering robots to create natural and empathic interactions via voice through emotion AI
Dr. Florian Eyben, CTO of audEERING.
This joint meeting with the IEEE Computer Chapter of the Lone Star Section featured Dr. Florian Eyben, CTO of audEERING.
His presentation focussed on empowering robots to create natural and empathic interactions via voice through emotion AI.
May 1, 2023 – The DaVinci Surgical Robot: History of Robotic Surgery and where we are going
Dr. Naveen Kella – Founder, The Urology Place
Dr. Kella presented this joint meeting with the IEEE Engineering and Medical Biology Chapter of the Lone Star Section. Dr. Kella is the most experienced robotic prostate surgeon in San Antonio as well as one of the most experienced in the nation. Dr. Kella discussed the history, controversies, and future of robotic surgeries.
Feb 24, 2023 – NEED FOR INFORMATION TECHNOLOGY AND AUTOMATION ON THE FUTURE BATTLEFIELD
Regular meeting of the IEEE EMB Chapter of the Lone Star Section, followed by a technical talk. Also held jointly with the Robotics and Automation Chapter and the Life Member Affinity Group.
Feb 23, 2023 – Indy Autonomous Challenge Winners
Andrea Ticozzi – Polytechnic University of Milan
Andrea Ticozzi of the Polytechnic University of Milan and the technical lead of team PoliMOVE, winner of three out of four Indy Autonomous Challenge events (Setting a new autonomous speed world record for a racetrack!), presented on the team’s technologies and experiences as part of the Indy Autonomous Challenge racing series. Mr. Ticozzi presented live via zoom from Italy.
Jan 26, 2023 – Robotics Research at SwRI
The presentation will begin with an introduction describing robotics R&D programs at SwRI. This will be followed by a lab tour and presentations of four recent programs.
Cody Porter of Southwest Research Institute
Cody will present an introduction describing robotics R&D programs at SwRI. This will be followed by a lab tour and presentations of four recent programs.
1. SwRI’s “Scan n Plan” technology – the ability to plan and execute robot motions from real-time 3D data
2. The mobile robotics platforms used by SwRI to research mobile navigation and manipulation capabilities
3. Robotic manipulation using force feedback, enabling robots to make compliant connections (such as plug/receptacles, wiring insertion, etc.)
4. The computer vision labs at SwRI, used to quickly develop optimal camera and lighting conditions for image processing applications.
Biography:
Cody has a life goal of taking robotics to places they have never been, doing things they have
never done. As a manager of the Robotic Platforms Section at Southwest Research Institute, he leads his
team to develop bespoke robotics for clients most challenging problems. He has 15 years of experience
supporting first article solutions as well as supported numerous clients in consultation arrangements. He
earned a Batchelor degree in Mechanical Engineering from Oklahoma State University and has a passion
for leading technical teams through novel research domains.
Nov 4, 2022 – Joint meeting of the UTSA Student Branch, the RAS Chapter and the SMC/AES/SYSC Chapter
Dr. Premachandra of Shibaura Institute of Technology
Topic: Voice-based victim searching in disaster-stricken areas using drone
Drone searches for victims in disaster-stricken areas have been mainly conducted by analyzing images from cameras mounted on drones. But in disaster-stricken areas, victims may not be able to recognize victims from images, due to situations such as being covered in sediment and debris. Therefore, as a method of searching for victims who are not captured by the camera, a method of determining the location of the victim by mounting a microphone device on a drone and detecting human voices from the collected sound is being studied. This talk will discuss the approaches of searching disaster victims by voice processing and related automatic flight control technologies for the searching activities.
Biography:
Chinthaka Premachandra (Senior Member, IEEE) was born in Sri Lanka. He received the B.Sc. and M.Sc. degrees from Mie University, Tsu, Japan, in 2006 and 2008, respectively, and the Ph.D. degree from Nagoya University, Nagoya, Japan, in 2011.
He is a Professor in the Department of Electronic Engineering, Graduate School of Engineering, Shibaura Institute of Technology, where he is currently the Manager of the Image Processing and Robotic Laboratory. His research interests include AI, UAV, Image processing, Audio processing, Intelligent Transport Systems (ITS), Mobile Robotics.
In addition to IEEE, Dr. Premachandra is also a member of IEICE, Japan; SICE, Japan; RSJ, Japan; and SOFT, Japan. He received the IEEE Sensors Letters Best Paper Award from the IEEE Sensors Council in 2022, and IEEE Japan medal from the IEEE Tokyo section in 2022. He also received the FIT Best Paper Award and the FIT Young Researchers Award from IEICE and IPSJ, Japan, in 2009 and 2010, respectively. He has served many international conferences and journals as a Steering Committee Member and an Editor, respectively. He is currently serving as an associate editor for IEEE Robotics and Automation Letters(R-AL) and IEICE Transactions on Information and Systems. He is the Founding Chair of the International Conference on Image Processing and Robotics (ICIPRoB) which is technically co-sponsored by the IEEE.
Sept 28, 2022 – Fluid Exoskeletons for Self-Assistive and Resistive Exercise
Dr. Emma Treadway spoke on “Fluid Exoskeletons for Self-Assistive and -Resistive Exercise” to the IEEE Robotics & Automation Society – Lone Star Chapter and interested students.
Program Description: Exoskeletons are promising for applications ranging from motor rehabilitation to active assist and zero-gravity exercise. In typical motorized exoskeletons, high torque requirements require the use of heavy motors. Fluid actuators on the other hand have relatively high power density (high power relative to their weight) and open the door to new rehabilitation and exercise paradigms inspired by the use of fluid transmissions. This talk explores the development and control of exoskeletons exploiting fluid transmissions to inspire two paradigms for exercise and rehabilitation: self-assist and self-resist. In self-assist, power is transmitted across the wearer’s body from a stronger joint to a weaker one via a fluid transmission in order to provide assistive forces during movement; this paradigm is attractive for applications such as stroke rehabilitation, in which patients often have stronger and weaker limbs. Self-resist on the other hand employs a fluid link to allow muscles to work against each other during exercise. Because this resistance exercise can be achieved without external grounding, it has potential application for zero-gravity exercise.
Bio: Dr. Emma Treadway is an Assistant Professor in the Department of Engineering Science at Trinity University. She received her M.S.E. and Ph.D. degrees in Mechanical Engineering from the University of Michigan, Ann Arbor in 2017 and 2019, respectively, and the B.S. degree in Engineering Science from Trinity University in 2011. Her research explores haptics and physical interactions between humans and
robots.
ROS2: Ready for Prime Time?
August 25, 2022
Our hybrid meeting featured a video from the Santa Clara Valley RAS Chapter (Available on ieee.tv) followed by a panel discussion featuring several local ROS users discussing differences and considerations in upgrading.
July 28, 2022 – Robot Manipulators in Space
June 23, 2022 – Cybersecurity Concerns of Industrial Systems
Dr. Victor Murray
Our meeting featured a presentation on Industrial Cybersecurity from Victor Murray, manager of the Cyber-Physical Systems Security Section at Southwest Research Institute (SwRI). He is a Certified Information Systems Security Professional (CISSP) whose background includes performing risk assessments, penetration tests, and developing secure systems. His presentation will take a closer look at vulnerabilities and mitigation strategies for iROS and other computer controlled automation systems.
Program:
Robotics and industrial automation systems can be exposed to cybersecurity attacks but the threats are different than for personal or business systems. This presentation considers vulnerabilities and mitigation strategies for iROS and other computer controlled automation systems.
News headlines occasionally tell of personal data leaks or financial breaches but actually multiple cyber-attacks are published on a daily basis. While the vast majority of cyber-attacks focus on traditional IT networks, there are many examples of attacks designed to exploit industrial systems.
This presentation will review some attacks that grabbed headlines including Colonial Pipeline, Stuxnet, and Triton Malware attacks. Unfortunately, bleeding edge industries, including robotics and industrial control, tend to be laser focused on functionality at the expense of cybersecurity. There are countless examples in other industries (blue tooth, Wi-Fi, CAN bus) where similar evolutions have occurred:
- No security, system just functions in the clear
- Technology takes off in popularity
- Technology gets hacked
- System gets re-designed to address security.
ROS-I for example commonly sends data over TCP/UDP connections in the clear. This can mean that if an attacker gets access to a ROS-I network then they have full control over your system. ROS 2 is moving towards addressing this with DDS-security, but this is not commonly used for ROS-I.
APr 28, 2022 – LSS R&A Amazon Fulfilment Center Virtual Tour
Program:
All your questions, answered. This one-hour tour, hosted by Amazon leaders, combines 360-degree footage, video, and live broadcasts from multiple Fulfillment Centers to replicate the experience of Amazon in-person tours. It also includes interactive Q&A.
Mar 24, 2022 – Tour of XYREC Robot Facility
Feb 24, 2022 – Autonomous Robotics for Lunar Landing Pad Construction
The presentation described civil engineering processes using autonomous robotics for excavation and site preparation for constructing a lunar landing pad. A concept of operations for landing pad construction was presented, centered around a regolith melting and brick placement technology being developed by San Antonio based Astroport Space Technologies. Inc. Additional technologies in development by Astroport for habitat and lunar infrastructure construction were also discussed.
Sam Ximenes is a Space Architect with over 30 years’ experience in the aerospace industry with NASA, DoD, and international space programs. He is currently CEO of Exploration Architecture Corporation (XArc), a space architecture consulting firm he founded in 2007. The firm specializes in commercial spaceport development and design, and space systems development for space exploration initiatives for planetary surface systems for habitation and human settlement He is also Founder and Board Chair of WEX Foundation, a non-profit organization for advancing careers in space exploration through SpaceSTEM education. His latest venture is CEO of Astroport Space Technologies, Inc., founded in 2020 as a wholly owned subsidiary of XArc to develop lunar construction technologies for emplacement of critical elements of lunar surface infrastructure.
Jan 27, 2022 – Indy Autonomous Vehicle Challenge – Dr. Kris Kozak
Program Information:
The Indy Autonomous Challenge (IAC) was ambitiously conceived of as a wheel-to-wheel race of fully autonomous race cars on the Indianapolis Motor Speedway (IMS) oval. Although a multi-car race didn’t materialize as envisioned, an exciting and boundary pushing competition was still held on schedule at IMS on October 23, 2021. The success of that IAC competition has since led to a follow-on competition at the Las Vegas Motor Speedway during the 2022 Consumer Electronics Show (CES) on January 7: the Autonomous Challenge at CES. For this presentation, Dr. Kris Kozak will give a behind the scenes look at the process that led up to the original competition, provide insight into the technologies used in the cars, and touch on some of the unique challenges that were faced by competitors.
Speaker Information:
Kris is an experienced researcher, developer and problem solver with a demonstrated history working globally to provide customized solutions in the dynamic fields of self-driving & autonomous vehicles, robotics, systems and software. Skilled in vehicle localization, control and perception with high-level experience developing software in C++, Matlab and Python. Kris earned his Doctor of Philosophy (Ph.D.) in Mechanical Engineering with a focus on robotics from Georgia Institute of Technology and currently serves as vice-chair of the LSS Robotics and Automation Society Chapter. This past year he was involved in the Indy Autonomous Challenge. He gave his presentation virtually.
Dec 9, 2021 – The application of drone imagery and structure-from-motion modeling to 3D volume analysis: a new era of scientific investigation – Dr. Ben Surpless
Joint Meeting of Trinity IEEE Student Branch and IEEE Robotics & Automation Chapter
Abstract: Unmanned aerial vehicles (UAVs) have become an increasingly integral part of industrial operations and scientific investigations. As costs of operating and maintaining UAVs have come down over the past decade, scientists are now able to inexpensively, efficiently, and accurately collect remotely-sensed data from localities once thought inaccessible. When combined with recent advances in hardware and software, scientists across a range of disciplines can now address research questions once thought, literally, out of reach. In addition to reviewing recent changes in drone use and operation, Surpless will explore how drone data are collected and analyzed in the context of a real-world geologic investigation.
Speaker: Ben Surpless is Professor of Geosciences at Trinity University, where he has performed research with students since 2005. Ben earned his Ph.D. in geosciences from Stanford University and has been awarded several National Science Foundation awards to support his research with students. He was awarded the 2013 Junior Faculty Teaching and Research Award and the 2020 Z.T. Scott Fellowship, for excellence in teaching and advising.
Oct 28, 2021 – Robot Reliability Management – Applications at Toyota Motor Manufacturing
Program:
Industrial robots are an essential part of the automotive manufacturing process by reducing costs and improving quality. Many processes are fully automated with industrial robots and the reliability of these robots plays an important role in manufacturing throughput. The strategy of robot reliability management is explained in this virtual presentation, with a focus on the predictive maintenance method utilizing sensors and data to monitor and predict robot health.
 Joe Li, PhD of Toyota Motor Manufacturing
Joe Li, PhD of Toyota Motor Manufacturing
Topic:
Toyota Motor Manufacturing – Robot Reliability Management
Biography:
Joe Li is the Engineering manager of the Paint & Plastic Department at Toyota Motor Manufacturing Texas. Joe has a Ph.D. in Welding Engineering and 30 years of experience in industrial robot and automation design, integration, and operation. He is a two-time winner of the A.F. Davis Machine Design Award from the American Welding Society and the 2019 Winner of Toyota Global President’s Award.
Sept 23, 2021 – Renu Robotics Tour
The September meeting of the Robotics and Automation Chapter was at Noon on Thursday, Sept 23. The meeting was a presentation and tour of Renu Robotics,a San Antonio manufacturer of robot tractors for solar farm vegetation control.
Aug 26, 2021 – Rehabilitation Robotics
Dr. Amy O. Bowles, MD of Brooke Army Medical Center (BAMC)
Topic:
Robotics for Medical Rehabilitation
Robotics have been used in rehabilitation since the early 1990s, but their use, utility, and relevance have increased dramatically in the last decade. This presentation will introduce the uses and limitations for robotics in rehabilitation while discussing several current clinical applications.
Biography:
Amy O. Bowles, MD, is board-certified in Physical Medicine and Rehabilitation, and she is the Chief of the Brain Injury Rehabilitation Service at Brooke Army Medical Center. She holds adjunct faculty appointments with the PM&R Departments at the University of Texas Health Science Center in San Antonio and the Uniformed Services University of the Health Sciences in Bethesda, Maryland. Dr. Bowles has been a co-author on a number of peer-reviewed papers and abstracts, and she is actively involved in research regarding cognitive rehabilitation and patient reported outcomes in the post-concussion population.
June 24, 2021 – San Antonio – City of Innovation
Location: Remote (Zoom)
Agenda: At this meeting, we heard from Iris Gonzalez about recent robotics startup companies and related activities.
May 27, 2021 – Academic Robotics Research in San Antonio
Location: Remote (Zoom)
Agenda: At this meeting, we heard from our academic members about research programmes in San Antonio in robotics, including:
- University of Texas at San Antonio (UTSA)
- Dr. Patrick Benavidez
- Mr. Daniel Brun
- Trinity University
- Dr. Kevin Nickels
- Dr. Emma Treadway
- University of the Incarnate Word (UIW)
- Mr. Srikanth Vemula
- St. Mary’s University
- Dr. Dante Tezza
May 20, 2021 – Recon Point – An Overview and Tour
Gabe Garza
Topic:
Reckon Point….An Overview and Tour
The meeting will be a presentation and demonstration by Gabe Garza, President and CEO of Reckon Point. He will discuss the Reckon Point Mobile Indoor Geolocation Survey Unit (MIGSU) and how it captures data for several industries it serves. The MGSU is equipped with advanced LIDAR technology which utilizes SLAM and artificial intelligence to develop 3D point clouds which are automatically registered. In addition to creating 3D maps the MIGUS collects advanced data for indoor geolocation that uses Wi-Fi and magnetic signals.
Founded in 2014, Reckon Point is a tech start-up located in San Antonio, Texas. With over 40+ combined years of experience with the DoD, Reckon Point specializes in 3D mapping & state-of-the-art indoor positioning technology, specifically indoors, where GPS proves otherwise ineffective. Our high-resolution data collection services are capable of collecting signals from the Earth’s electromagnetic field, along with Wi-Fi, Bluetooth, and LiDAR for sub-meter accuracy with pinpoint precision within just 2 centimeters.
Website: reckonpoint.com
Biography:
Gabe Garza is a seasoned System Architect with extensive experience in cyber security, cloud development and signal processing. Gabe has lead multiple advanced research and development projects for cloud based applications for the Air Force 24th Cyber Defensive
Squadron and the 25th Airforce Cyber Offensive Squadron. Additionally, Gabe has served as the lead flight test Engineer for and advanced DARPA missile program for autonomous tracking and navigation. Gabe has over 20 years of advanced research and development experience for DoD and private firms. He was awarded his bachelor’s Degree in Electrical Engineering from University of Sothern Maine in 2004. In 2008 Gabe earned his Master’s Degree in Electrical and Computer Engineering from Worchester Polytechnic Institute with a focus is wireless communications and electromagnetics.
Apr 22, 2021 – Robotics Research at Southwest Research Institute
- Location: Southwest Research Institute
- Speakers: Paul Evans, P.E., Director at Southwest Research Institute, and David Anthony, Senior Research Engineer, Southwest Research Institute
- Joint Meeting: UTSA Student Branch, Robotics & Automation Society; Lone Star Section, TEMS Chapter
- Agenda: Mr. Evans and Dr. Anthony reviewed some of the robotics and automation work that SwRI has conducted in San Antonio.
Mar 25, 2021 – Organizational Meeting
- Location: San Antonio Museum of Science and Technology
- Agenda: At this meeting, we discussed the goals and objectives of the chapter, logistics and procedures, and took nominations for officers.